









太陽能跟蹤系統(tǒng)中的傾角傳感器的應(yīng)用
來源:網(wǎng)絡(luò) | 2評論 | 10829查看 | 2016-02-25 16:49:44
太陽能是可再生能源之一,它具有豐富、清潔、容易開發(fā)等優(yōu)點(diǎn)。隨著全球能源短缺的問題日益凸顯,如何開放利用好太陽能,并通過相應(yīng)的設(shè)備進(jìn)行精確吸收成為了當(dāng)今世界研究的課題。在新能源中,太陽能發(fā)電已成為全球研究的重要領(lǐng)域。太陽能作為一種清潔的能源,開發(fā)前景廣闊。然而由于太陽存在著光照強(qiáng)度隨著時間不斷變化等問題,這對太陽能的利用裝置提出了一定的技術(shù)要求。目前很多太陽能電池板陣列基本都是固定的,不能充分利用太陽能資源,發(fā)電效率低下。據(jù)相關(guān)實(shí)驗(yàn)表面,在太陽能電池板陣列中,相同條件下采用自動跟蹤系統(tǒng)發(fā)電要比固定裝置發(fā)電高35%左右。
太陽能跟蹤系統(tǒng)是能讓電池板時刻正對太陽,讓光線隨時垂直照射電池板的系統(tǒng)裝置,能顯著提高光伏組件的發(fā)電效率。目前市場上所使用的跟蹤系統(tǒng)按照驅(qū)動裝置分為兩種,分別是單軸太陽能自動跟蹤系統(tǒng)和雙軸太陽能自動跟蹤系統(tǒng)。單軸是僅可以水平方向跟蹤,在高度上人為的進(jìn)行調(diào)節(jié)固定,這樣不僅工作量大,而且跟蹤精度不高。雙軸跟蹤可以在水平和高度兩個方向跟蹤太陽軌跡,顯然雙軸的性能要明星高于單軸。
跟蹤系統(tǒng)從控制手段上系統(tǒng)可分為傳感器跟蹤和程序跟蹤(也稱視日運(yùn)動軌跡跟蹤)。傳感器跟蹤是利用傳感器檢測太陽光線是否偏離電池板法線,當(dāng)太陽光線偏離電池板法線時,傳感器發(fā)出偏差信號,并控制執(zhí)行機(jī)構(gòu),使跟蹤裝置從新對準(zhǔn)太陽。這種跟蹤裝置靈敏度高,但是容易受環(huán)境影響,如烏云遮住時。程序軌跡跟蹤,是根據(jù)太陽的實(shí)際運(yùn)行軌跡,按照預(yù)定的程序調(diào)整跟蹤裝置。這種跟蹤方式能夠全天候?qū)崟r跟蹤,其精度不是很高,但是符合運(yùn)行情況,應(yīng)用較廣泛。
控制器一般分為PLC和單片機(jī)控制。單片機(jī)控制程序在出廠時編寫開發(fā),一般設(shè)備一旦定型,不會再輕易改動。使用PLC開放較為普遍,可以很方便的學(xué)會簡單的調(diào)試和編寫,并且PLC的通訊接口多樣,通訊組網(wǎng)要比單片機(jī)方便簡單。本文以使用PLC主控單元,程序控制雙軸自動跟蹤系統(tǒng)為例進(jìn)行深入分析,程序跟蹤就是利用PLC控制單元相應(yīng)的公式和算法,計(jì)算出太陽的實(shí)時位置:方位角和高度角,然后控制執(zhí)行機(jī)構(gòu)跟蹤裝,以達(dá)到實(shí)時跟蹤的目的。
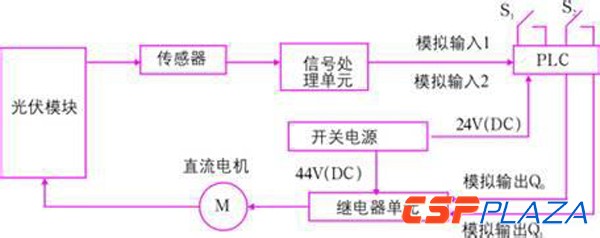
太陽方位角即太陽所在的方位,是指太陽光線在地平面上的投影與當(dāng)?shù)刈游缇€的夾角,可以近似看作是樹立在地面上的直線在陽光下的陰影與正南方向的夾角。太陽方位角和高度角的實(shí)時數(shù)值可以通過地理經(jīng)緯度等參數(shù)利用公式計(jì)算出來。控單元是太陽能跟蹤系統(tǒng)的核心部件,系統(tǒng)選用結(jié)構(gòu)緊湊??梢赃x用西門子PLC200,配置靈活、指令,通訊集成有RS232和RS485兩個通訊接口,RS232用于與工業(yè)觸摸屏通訊,RS485可用于組網(wǎng)使用。也可以用一些模擬量模塊,方便采集風(fēng)速等保護(hù)數(shù)據(jù)。工業(yè)觸摸屏能夠監(jiān)視運(yùn)行狀態(tài)、改變參數(shù)設(shè)置,以達(dá)到控制目的。跟蹤的機(jī)械裝置一般由底座、立軸、橫軸、兩臺旋轉(zhuǎn)電機(jī)、傳動齒輪等組成。其中一臺旋轉(zhuǎn)電機(jī)驅(qū)動橫軸,支撐太陽能電池板繞橫軸運(yùn)動,跟蹤高度角運(yùn)行。另一臺旋轉(zhuǎn)電機(jī)驅(qū)動水平軸,以跟蹤方位角變化。
在一天的整個過程中,跟蹤器能夠獲得最優(yōu)的高度角和方位角,電池板能夠接收到最大太陽日輻射量。系統(tǒng)用一套公式由PLC計(jì)算出實(shí)際時刻太陽所在的高度角和方位角。此公式根據(jù)所在的地理經(jīng)度、緯度、時間以及時區(qū),(時區(qū)用分鐘表示,東區(qū)為正)從而得出太陽的高度角和方位角。系統(tǒng)根據(jù)實(shí)時太陽高度角和方位角與跟蹤裝置實(shí)際的高度角和方位角的差值,以及驅(qū)動裝置的運(yùn)轉(zhuǎn)速度,計(jì)算出執(zhí)行機(jī)構(gòu)的跟蹤運(yùn)行時間。最后通過程序執(zhí)行驅(qū)動電機(jī)達(dá)到要求的位置,實(shí)現(xiàn)對高度角和方位角的跟蹤。
跟蹤模式的判斷過程完全由軟件實(shí)現(xiàn),靈活度高,可以針對不同地區(qū)和不同的氣候進(jìn)行調(diào)整,從而提高太陽能發(fā)電站的發(fā)電效率。還可以根據(jù)需要增加光強(qiáng)傳感器、風(fēng)力傳感器,傾角傳感器等多傳感裝置,提高安全性和更高的控制要求。關(guān)于旋轉(zhuǎn)的角度,可以通過傾角傳感器來測量當(dāng)前的角度值,通過風(fēng)力傳感器用于對系統(tǒng)的保護(hù)作用,當(dāng)風(fēng)力大于一定數(shù)值時,系統(tǒng)停止工作,復(fù)位到原點(diǎn),風(fēng)速滿足工作條件時,系統(tǒng)自動開始工作。太陽能電池板有兩個自由度,控制機(jī)構(gòu)對高度角和方位角兩個方向進(jìn)行調(diào)整。當(dāng)電池板轉(zhuǎn)到盡頭時,由于跟蹤裝置裝了限位傳感器,到限位觸點(diǎn)時自動切斷輸出,電機(jī)停止工作。對于串、并聯(lián)的大型光伏太陽能陣列系統(tǒng)的控制,可以通過通訊網(wǎng)絡(luò)進(jìn)行集中控制。由此可見系統(tǒng)具有精度高、能實(shí)時跟蹤太陽變化、通訊組網(wǎng)方便等特點(diǎn),能夠滿足客戶的需求。
相關(guān)閱讀
- 倍福在SNEC上展示光熱發(fā)電跟蹤系統(tǒng)
- SolarWorld推出Suntrac太陽能跟蹤器系統(tǒng)
- 向日葵引發(fā)新的太陽能跟蹤系統(tǒng)設(shè)計(jì)思想
- 創(chuàng)新設(shè)計(jì)的QBotix太陽能雙軸跟蹤系統(tǒng)
- 恩梯恩開發(fā)太陽能熱發(fā)電跟蹤裝置 電動馬達(dá)驅(qū)動
- SKF聚光太陽能跟蹤系統(tǒng)方案有效增加發(fā)電量
- IMO推出太陽能跟蹤系統(tǒng)控制器
- 斜單軸跟蹤太陽能電站將進(jìn)入里程碑時代
- 光熱發(fā)電跟蹤系統(tǒng)的“心臟” 制造者
- 太陽能跟蹤系統(tǒng)國際IEC認(rèn)證標(biāo)準(zhǔn)引重視
- 受傷的太陽能跟蹤器 未來前景更為看好
- 北微傳感將攜跟蹤傾角傳感器及控制方案亮相CPC2017大會
- 工業(yè)生產(chǎn)的“眼睛”——傳感器迎來光熱發(fā)電新市場機(jī)遇
- 江西凱潤達(dá)將攜磁性位移傳感器亮相CPC2018
最新評論
2人參與
AlexDong
飛浩電氣技術(shù)(上海)有限公司<br />
Fihoo Electric Technology Co.,LTD<br />
<br />
產(chǎn)品系列:<br />
高精度編碼器( 21bits )、高靈敏傾角儀、磁柵尺、接近開關(guān)、壓力傳感器、溫度傳感器、流量計(jì)等。 代理德系品牌產(chǎn)品:德國CARLEN-sensors(卡倫)傳感器、 德國SICK(思科)全系列產(chǎn)品、 德國SIKO(西控)全系列產(chǎn)品、 德國GRAF(格
2016-06-20 13:16:16
太陽能監(jiān)測
北京藍(lán)陽惠通科技有限公司是太陽能監(jiān)測與評估、太陽能輻射儀器、光功率預(yù)測、光熱電站配套輻射表、光熱電站配套測光系統(tǒng)、光伏電站配套測光系統(tǒng)、風(fēng)功率預(yù)測、環(huán)境監(jiān)測設(shè)備、氣象站供應(yīng)商?;诿绹鳦ampbell Scientific Inc.(CSI)公司的優(yōu)質(zhì)數(shù)據(jù)采集器,融合 眾多設(shè)備生產(chǎn)廠的技術(shù),致力于太陽能、風(fēng)能、氣象、工業(yè)巖土大壩汽車、土壤、地基遙感等多個領(lǐng)域的監(jiān)測應(yīng)用的研究、集成和開發(fā),配置Campbell公司、Vaisala公司、Met one公司、Kipp&zonen公司
2016-04-12 13:46:37

馬上參與
最新資訊
-

-

-

-
 10小時前 10:48
10小時前 10:48 -
 昨天 06-02 18:42
昨天 06-02 18:42 -
 昨天 06-02 18:39
昨天 06-02 18:39 -
 昨天 06-02 18:35
昨天 06-02 18:35 -

-

-
 05-29 18:44
05-29 18:44 -
 05-29 18:03
05-29 18:03 -
 05-29 11:43
05-29 11:43 -
 05-29 11:08
05-29 11:08 -

-
 05-28 19:04
05-28 19:04


