









臺達PLC可編程邏輯控制器可應(yīng)用于槽式光熱發(fā)電跟蹤系統(tǒng)
發(fā)布者:walt | 來源:臺達集團-中達電通股份有限公司 | 0評論 | 11277查看 | 2017-12-05 14:14:00
隨著現(xiàn)代工業(yè)的發(fā)展,全球能源危機和大氣污染問題日益突出,太陽能這一清潔的可再生能源,已受到許多國家的高度重視和利用。中國不僅太陽能資源豐富,而且分布范圍較廣,因此充分利用太陽能資源成為重點能源戰(zhàn)略。
由太陽能電池板的特性可知,其發(fā)電量與照射到它上面的光照強度成正比,接受太陽的直射光,可以得到太陽最大光照強度。試驗證明,采用相同功率的太陽電池板,自動跟蹤式光伏發(fā)電設(shè)備要比固定式光伏發(fā)電設(shè)備提高發(fā)電量至少25%以上,成本下降20%。由于太陽的位置每時每刻都在變化,若想在太陽能電池板上得到最大輸出功率,就必須隨時跟隨太陽的運動軌跡,確保太陽光始終垂直照射到太陽能電池板,而太陽光自動跟蹤控制系統(tǒng)的使用可以實現(xiàn)這一目的。
一、太陽跟蹤技術(shù)介紹
光伏發(fā)電系統(tǒng)控制,根據(jù)系統(tǒng)是否存在反饋,可分為:閉環(huán)、開環(huán)、混合三種控制方式。整個光伏發(fā)電系統(tǒng)的架構(gòu)如圖1所示。
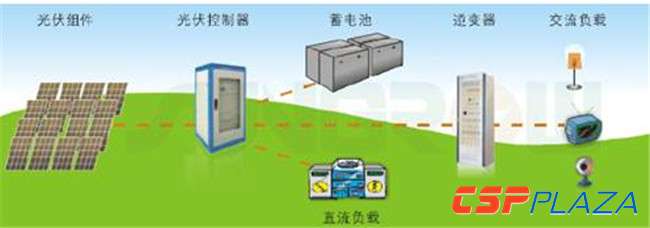
圖1:光伏發(fā)電系統(tǒng)架構(gòu)
1.開環(huán)控制
開環(huán)控制方式又分為勻速運動跟蹤和視日運動跟蹤。
?。?)勻速運動跟蹤
由于地球的自轉(zhuǎn)速度是固定的,可以認為,早上太陽從東方升起經(jīng)正南方向向西運動并落山,太陽在方位角上以15°/h勻速運動,24h移動一周。高度角等于當(dāng)?shù)鼐暥茸鳛橐粋€極軸不變。其跟蹤過程是將固定在極軸上的太陽能電池板以地球自轉(zhuǎn)角速度15°/h的速度轉(zhuǎn)動,即可達到跟蹤太陽,保持太陽能電池板平面與太陽光線垂直的目的。
該方法控制簡單,但安裝調(diào)整困難,初始角度很難確定和調(diào)節(jié),受季節(jié)等因素影響較大,導(dǎo)致控制精度較差。
?。?)視日運動跟蹤
太陽的運行軌跡與時間、季節(jié)、當(dāng)?shù)亟?jīng)緯度等諸多復(fù)雜因素有關(guān)。因此,可以將上述相關(guān)的數(shù)據(jù)預(yù)先輸入到PLC中通過程序計算出太陽方位角和高度角,實現(xiàn)時間和空間上的同步,最終得出實際角度以實現(xiàn)精確的控制。由于該方法精度高,具有較好的適應(yīng)性,因此會詳細介紹此方法。
2.閉環(huán)控制
閉環(huán)控制一般采用傳感器來檢測入射光線是否與接收光表面垂直,當(dāng)出現(xiàn)偏差角度達到設(shè)定值時控制電機轉(zhuǎn)動,從而實現(xiàn)對高度角和方位角的跟蹤,常用的傳感器有光電池、光敏電阻等。
3.混合控制
開環(huán)和閉環(huán)跟蹤系統(tǒng)都存在著自己的優(yōu)點和缺點:開環(huán)控制優(yōu)點是在有云的情況仍能正常工作,缺點是存在累積誤差,并且自身不能清除;閉環(huán)控制的優(yōu)點是自身能夠通過反饋來消除誤差,但是也存在著在云多的情況下工作不穩(wěn)定的缺點。
混合控制就是結(jié)合兩者的優(yōu)點和克服兩者的缺點,在一般沒有云的情況下使用閉環(huán)的傳感器跟蹤,但當(dāng)云擋住太陽的時候,控制系統(tǒng)立即改變?yōu)殚_環(huán)控制方式,繼續(xù)跟蹤,直到云過去后,再重新使用傳感器跟蹤。交替開環(huán)和閉環(huán)的混合控制系統(tǒng),結(jié)合開環(huán)和閉環(huán)控制的偏差信號,所以能夠得到最佳的控制效果。因為閉環(huán)和開環(huán)控制本身都存在著內(nèi)部偏差,所以這種混合控制方式將提供最準(zhǔn)確的控制信號。
二、追日系統(tǒng)功能
追日系統(tǒng)的作用是使聚光器的軸線始終對準(zhǔn)太陽,實現(xiàn)效率最大化。圖2為拋物槽式集熱器。根據(jù)入射光線和主光軸的位置關(guān)系,可以將跟蹤形式分成:雙軸跟蹤和單軸跟蹤。雙軸跟蹤使得入射光跟主光軸方向時刻保持一致。而單軸跟蹤,只需入射光在主光軸和焦線的平面內(nèi)即可。
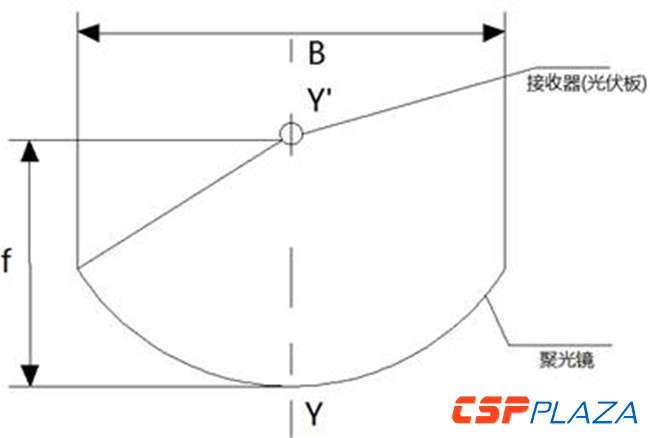
圖2:拋物槽式集熱器示意圖
其中:B——聚光鏡開口口徑,f——反射鏡焦距,Y—反線——主光軸
槽式聚光集熱器一般是南北布置、東西跟蹤或東西布置、南北跟蹤,其特點是一維跟蹤水平布置,大型槽式太陽能聚光器不僅驅(qū)動扭矩大,而且驅(qū)動旋轉(zhuǎn)角度范圍廣。槽式聚光器采用主動式跟蹤,其跟蹤太陽的角度算法和二維雙軸跟蹤的跟蹤角度算法有很大區(qū)別。
本文針對槽式太陽能熱發(fā)電的聚光器特點設(shè)計槽式太陽能跟蹤控制系統(tǒng),采用PLC計算視日運動軌跡,對槽式聚光器進行主動式太陽跟蹤,不依賴于氣候變化。本文設(shè)計的槽式太陽能自動跟蹤系統(tǒng),能根據(jù)風(fēng)速和時間自動實現(xiàn)保護,可實現(xiàn)全自動、全天候的太陽跟蹤。如圖3所示。

圖3:槽式太陽能自動跟蹤系統(tǒng)
1.追日算法
追日系統(tǒng)包括兩個重要參數(shù):太陽高度角和太陽方位角。
太陽高度角指太陽中心直射到當(dāng)?shù)氐墓饩€與當(dāng)?shù)厮矫娴膴A角,即是指太陽光的入射方向和地平面之間的夾角。
太陽方位角即太陽所在的方位,指太陽光線在地平面上的投影與當(dāng)?shù)刈游缇€的夾角,可近似地看作是豎立在地面上的直線在陽光下的陰影與正北方的夾角,取順時針方向。如圖4所示。
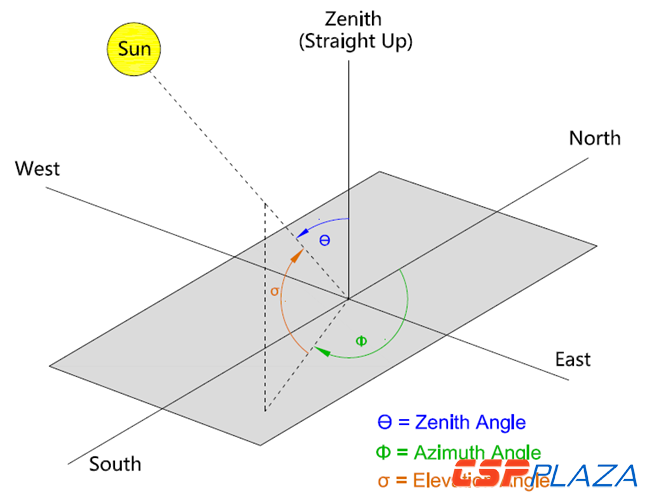
圖4:太陽高度角和太陽方位角示意圖
主動式跟蹤需要精確計算太陽位置,比利時天文專家JeanMeeus和美國國家能源部可再生能源實驗室(NREL)公布一種高精度太陽位置的計算算法(solarpositionalgorithm,SPA)。臺達PLC提供專用的SPA指令,輸入當(dāng)?shù)氐慕?jīng)度、緯度等相關(guān)信息后,會自動得到當(dāng)前太陽的高度角和方位角。如圖5、表1所示。

圖5:SPA指令輸入界面

表1:SPA指令輸入?yún)?shù)
聚光器跟蹤太陽的運動包括東極限位到西極限位的逆時針旋轉(zhuǎn)及對應(yīng)的順時針旋轉(zhuǎn),拋物槽式聚光器槽口幾何中心朝正東方向定義為零位(東極限位),系統(tǒng)由東向西跟蹤太陽逆時針方向為角度增加,系統(tǒng)由西向東順時針方向為角度減少,拋物槽式聚光器槽口幾何中心朝正西方向定義為180°(西極限位),跟蹤角度范圍為0~180°。槽式聚光器跟蹤太陽的角度算法和二維雙軸跟蹤的跟蹤角度算法有很大區(qū)別。在基于臺達SPA指令計算當(dāng)?shù)禺?dāng)時的太陽高度和方位,再經(jīng)過PLC計算出單軸旋轉(zhuǎn)角度。如圖6所示。
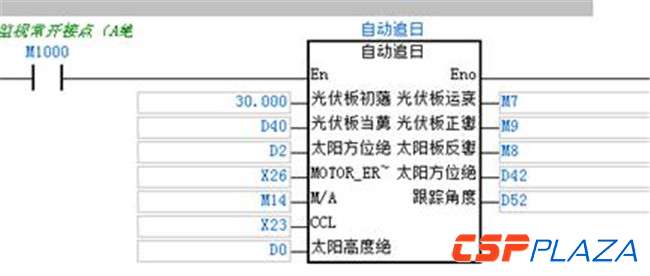
圖6:自動追日顯示界面
通過臺達PLC的萬年歷來設(shè)定每天啟動和停止跟蹤的時間,到達停止時間后自動回原點,等到第二天自動啟動跟蹤追日。

圖7:自跟蹤狀態(tài)界面
另外,追日系統(tǒng)還具有大風(fēng)、大雪、高溫自動降熱和維修等保護功能。
結(jié)束語
本文介紹基于臺達PLC的槽式單軸跟蹤太陽能發(fā)電系統(tǒng),采用主動式跟蹤太陽的日運動軌跡控制策略,以簡單的太陽位置計算法實現(xiàn)槽式太陽集熱器的精確太陽跟蹤,控制器不受外界天氣和光電傳感器影響。臺達PLC提供專用的SPA指令,方便開發(fā)者計算太陽高度角和方位角,避免復(fù)雜算法編制。
相關(guān)閱讀
最新評論
0人參與

馬上參與
最新資訊
-

-

-

-
 10小時前 10:48
10小時前 10:48 -
 昨天 06-02 18:42
昨天 06-02 18:42 -
 昨天 06-02 18:39
昨天 06-02 18:39 -
 昨天 06-02 18:35
昨天 06-02 18:35 -

-
 05-30 11:25
05-30 11:25 -
 05-29 18:44
05-29 18:44 -
 05-29 18:03
05-29 18:03 -
 05-29 11:43
05-29 11:43 -
 05-29 11:08
05-29 11:08 -
 05-29 09:11
05-29 09:11 -
 05-28 19:04
05-28 19:04


